
เพิ่มความสามารถในการทำงานให้มีประสิทธิภาพอย่างสมบูรณ์ โดยเฉพาะในกระบวนการผลิตที่มีความซับซ้อน หรือต้องใช้ความประณีตในการทำงาน
Automation system and Robotics
Automation
ความรู้เบื้องต้นเกี่ยวกับ Automation คือ ระบบอัตโนมัติหรือกลไกใด ๆ ที่สามารถเริ่มต้นได้เอง โดยการรันโปรแกรมที่วางไว้
Automation System หรือ Automatic Control (ระบบอัตโนมัติหรือระบบควบคุมอัตโนมัติ) คือระบบการควบคุมแบบต่าง ๆ เช่น การทำงานของเครื่องจักรในโรงงาน หม้อต้มและเตาอบ โครงข่ายโทรศัพท์ การบังคับทิศทางและการรักษาสมดุลในเรือ ในเครื่องบิน หรือยานพาหนะต่าง ๆ
ประโยช์ของของระบบอัตโนมัติคือการช่วยประหยัดแรงงาน แต่ก็ยังใช้เพื่อประหยัดพลังงานและวัสดุ รวมทั้งปรับปรุงคุณภาพ ความถูกต้องและความแม่นยำของสายการผลิตได้อีกด้วย
Robotics
คือการออกแบบและพัฒนาให้หุ่นยนต์ในอุตสาหกรรมมีประสิทธิภาพมากขึ้น ในรูปแบบที่ตอบโจทย์ในการใช้งานสำหรับอุตสากรรมการผลิตในยุคปัจจุบันได้ดียิ่งขึ้น คุณสมบัติของหุ่นยนต์อุตสาหกรรมจะมีการควบคุมอัตโนมัติ ความสามารถในการถูกตั้งโปรแกรมหรือการตั้งค่าการทำงานได้อย่างหลากหลายด้วยระบบตั้งแต่ 3 แกนขึ้นไป ทั้งในรูปแบบติดตั้งและรูปแบบที่สามารถเคลื่อนย้ายได้
- Linear Robot คือ หุ่นยนต์ที่ทำงานบนแกนตั้งฉากซึ่งหมายรวมถึงหุ่นยนต์แบบ Cartesian และ Gantry เอาไว้ด้วยกัน
:: นิยมใช้ในการหยิบจับเพื่อทำการประกอบ เช่น การประกอบชิ้นส่วนอิเล็กทรอนิกส์ หรือติดชิ้นส่วนยานยนต์ด้วยสารเคมี - SCARA หุ่นยนต์ที่มีความโดดเด่นเรื่องความคล่องแคล่วรวดเร็วแต่มีข้อจำกัดสำหรับระยะการปฏิบัติการณ์
:: เหมาะกับงานประกอบชิ้นส่วนที่ต้องการความรวดเร็วและมีขนาดเล็ก และต้องการความแม่นยำสูงจากการคำนวณรูปแบบการทำงาน สามารถใช้งานได้ดีกับอุตสาหกรรมชิ้นส่วนอิเล็กทรอนิกส์ - Parallel Robot หรือเรียกอีกชื่อหนึ่งว่า Delta Robot เป็นหุ่นยนต์ที่มีลักษณะคล้ายคลึงกับแมงมุม มีจุดเด่นในการขยับและจับชิ้นส่วนได้อย่างแผ่วเบา
:: เหมาะสำหรับอุตสาหกรรมอาหารและบรรจุภัณฑ์ - Cylindrical Robot หุ่นยนต์ที่มีข้อต่อโรตารีอย่างน้อย 1 จุดที่ฐานเพื่อทำการหมุนปรับทิศทาง แขนจับวัตถุเคลื่อนที่ขึ้นลงด้วยกระบอกนิวแมติก
:: นิยมใช้ในงานประกอบชิ้นส่วน วิธีการเชื่อมจุด รวมถึงการจัดการเคลื่องมือกล - Articulated Robot หุ่นยนต์ที่ประกอบด้วยข้อต่อโรตารีตั้ง 3 จุดขึ้นไป และอาจมีมากได้ถึง 10 จุด ส่วนใหญ่จะเจอแบบ 6 แกน สามารถใช้ในสายการผลิตได้อย่างหลากหลายและประยุกต์ใช้งานได้ตามลักษณะของสายการผลิตได้อย่างเหมาะสม:: รองรับขนาดชิ้นส่วนได้หลากหลายขึ้นอยู่กับศักยภาพของรุ่นจากแต่ละผู้ผลิต
Robotics หุ่นยนต์กับบทบาทที่มีมากขึ้นในชีวิตประจำวัน ได้แก่
- ช่วยลดต้นทุนการผลิต
- มีขนาดกระทัดรัด
- ฉลาดและใช้พลังงานอย่างมีประสิทธิภาพ
- ได้เปรียบด้านความยืดหยุ่น คล่องตัว อัจฉริยะ และความสะดวกต่อการใช้งาน
การได้รับความนิยมกันอย่างแพร่หลายและมีบาทมากขึ้นอย่างต่อเนื่อง ทำให้อัตราผู้ใช้งาน Robots จะเพิ่มสูงขึ้นอย่างรวดเร็ว โดยเฉพาะในกลุ่มธุรกิจ SMEs
(ปริมาณการใช้งาน Robots ในครัวเรือนและเพื่อความบันเทิงจะเพิ่มขึ้นอย่างมาก เฉลี่ย 55% ต่อปี ภายในช่วงระยะเวลา 5 ปีข้างหน้า )
การนำไปประยุกต์ใช้ระบบอัตโนมัติและหุ่นยนต์
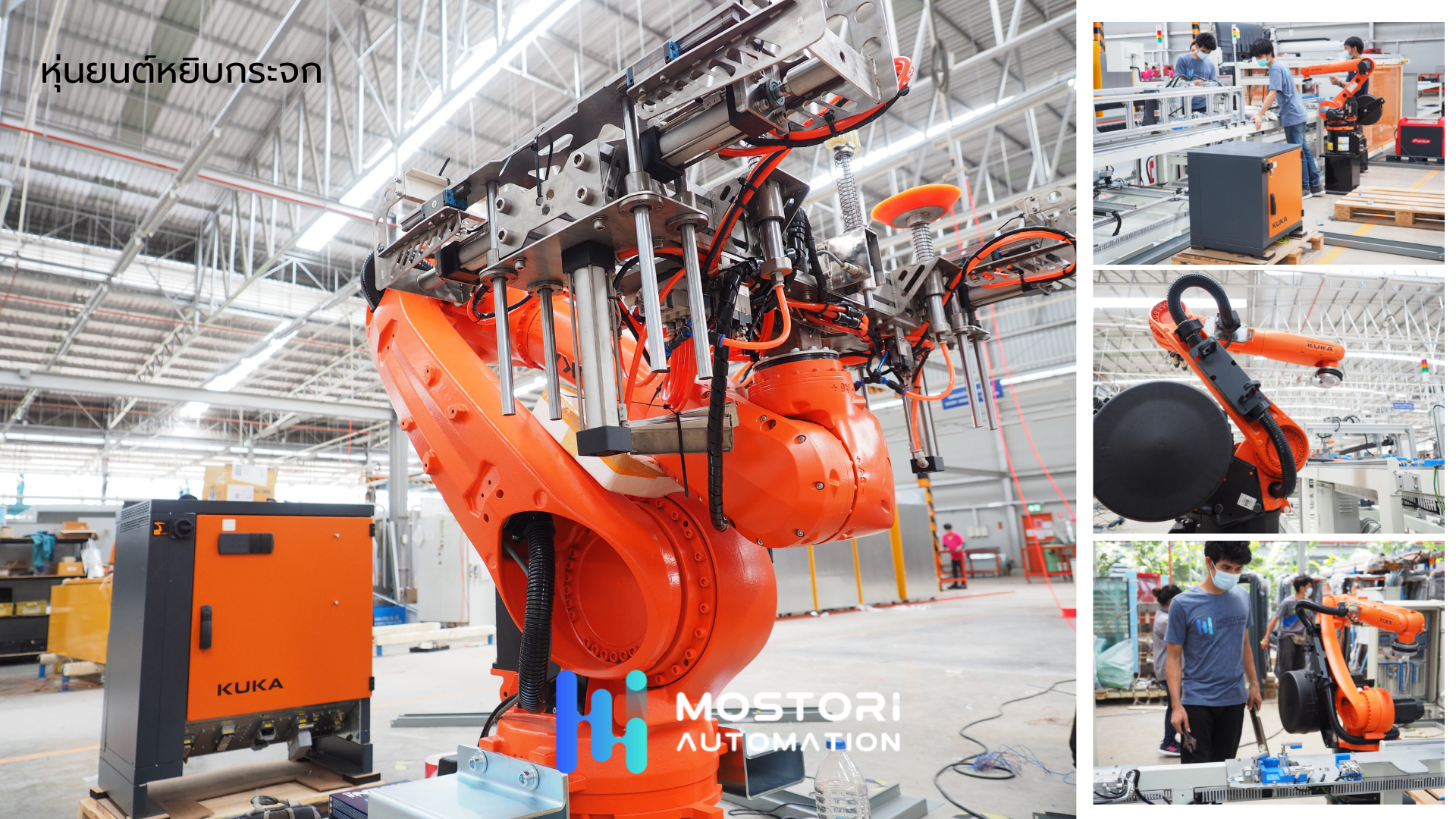
หนึ่งในกระบวนการสำคัญในอุตสาหกรรมการผลิตก็คือ การประกอบชิ้นส่วน ซึ่งต้องใช้ความละเอียด แม่นยำ ทำให้หลายอุตสาหกรรมเลือกใช้ หุ่นยต์ robot เข้ามาทำงานในกระบวนการนี้มากขึ้น
หลักการการประกอบชิ้นส่วนชิ้นงานคือ หุ่นยนต์จะได้รับการโปรแกรมระบุตำแหน่งและแนวการวางที่ถูกต้องของชิ้นส่วนหรือวัสดุนั้นๆ เพื่อให้สามารถหยิบจับชิ้นส่วนไปประกอบเป็นชิ้นงานได้สมบูรณ์
automation Robotics ในอุตสาหกรรมการผลิต
ด้วยความสามารถในการทำงานที่มีประสิทธิภาพอย่างสมบูรณ์ โดยเฉพาะในกระบวนการผลิตที่มีความซับซ้อน หรือต้องใช้ความประณีตในการทำงาน
โครงสร้างของหุ่นยนต์ (robotics) ในงานอุตสาหกรรมจึงถูกแบ่งออกเป็น 2 ส่วนได้แก่
| 1.ส่วนลำตัวและแขน (Body and Arm) เป็นส่วนที่หุ่นยนต์ใช้ในการจัดตำแหน่งที่ถูกต้องสำหรับการทำงาน โดยการเคลื่อนที่ของส่วนลำตัวและแขนสามารถเคลื่อนที่ได้ 3 ทิศทาง คือ
•เคลื่อนที่ในแนวดิ่ง (แนวแกน Z)
•เคลื่อนที่ในแนวรัศมี (เคลื่อนที่แบบเข้า-ออกหรือแนวแกน Y)
•การเคลื่อนที่จากซ้ายไปขวา (แนวแกน X)
|
 |
2.ส่วนข้อมือ (Wrist) เป็นส่วนที่หุ่นยนต์ใช้ในการจัดทิศทางที่ถูกต้องและเหมาะสม ในการหยิบจับชิ้นงาน โดยส่วนข้อมือจะมีการเคลื่อนที่ได้อย่างอิสระ 3 รูปแบบหลักๆ คือ •Roll เป็นลักษณะการเคลื่อนที่ของข้อมือหุ่นยนต์ไปในทิศทางเป็นวงกลม หรือหมุนรอบวัตถุ
•Pitch เป็นลักษณะของการหมุนข้อมือหุ่นยนต์ในทิศทางขึ้นและลง
•Yaw เป็นลักษณะของการหมุนข้อมือหุ่นยนต์ในทิศทางซ้ายและขวา
|
| Motors and Driver
การทำงานร่วมกันระหว่างมอเตอร์ที่สร้างแรงหมุนสำหรับการเคลื่อนที่ของหุ่นยนต์ และไดรเวอร์ที่ช่วยควบคุมการส่งพลังงานไฟฟ้าไปยังมอเตอร์ |
Speed Reducers
เปลี่ยนความเร็วมอเตอร์ ให้มีแรงทำงานและแรงบิดที่เหมาะสม |
Sensors
ช่วยจัดเก็บข้อมูลจากสภาพแวดล้อมของการทำงานทั้ง โดยอุปกรณ์เซ็นเซอร์นี้มีทั้งรูปแบบมีสายและไร้สายให้เลือกใช้ |
| End-Effectors
เอ็นเอฟเฟคเตอร์หรืออุปกรณ์จัดการชิ้นงาน จะถูกติดตั้งไว้ที่ปลายแขนของหุ่นยนต์เพื่อจัดการชิ้นงานให้เรียบร้อย |
Autonomous Navigation System (ANS)
ระบบนำทางอัตโนมัติ
|
IT Software
ระบบซอฟต์แวร์ส่งข้อมูลไปมาระหว่างอุปกรณ์ควบคุมและหุ่นยนต์ |
#Robotics #Automation #KUKA #ระบบอัตโนมัติ
สรุป : ทำไม? หุ่นยนต์ robot จึงมีบทบาทมากขึ้นต่อจากนี้ไป

ภาพจาก scbam.com_https://www.scbam.com/medias/upload/knowladge/mr.kongtun/150917-02.jpg